Overview:
Learn how to use
Simulink to make a Raspberry Pi based theremin that is controlled by a green
object. A theremin is an electronic musical instrument that can be played
without physical contact. The Raspberry Pi utilizes basic image processing
algorithms to generate various tones through its onboard audio jack.
Summary of Functionality:
If built correctly, this project should be able to:
- Mark the centroid of a green object with red crosshairs
- Generate sound through the Raspberry Pi's audio jack
- Change the frequency and gain of the audio-based upon the x and y coordinates of the green object
Step 1: Hardware and
Software Needed
To construct this project, you will need:
- Raspberry Pi
- Raspberry Pi Camera board
To run the code you
will need:
- MATLAB
- Simulink
Simulink Support
Package for Raspberry Pi
If you do not have
MATLAB and Simulink, you can get a 30-day free trial by clicking on the link
below!
Step 2: Hardware
 All you need to do for the hardware portion of this project is to connect the Raspberry Pi Camera board to the CSI connector on the Raspberry Pi.
All you need to do for the hardware portion of this project is to connect the Raspberry Pi Camera board to the CSI connector on the Raspberry Pi.
Step 3: Software
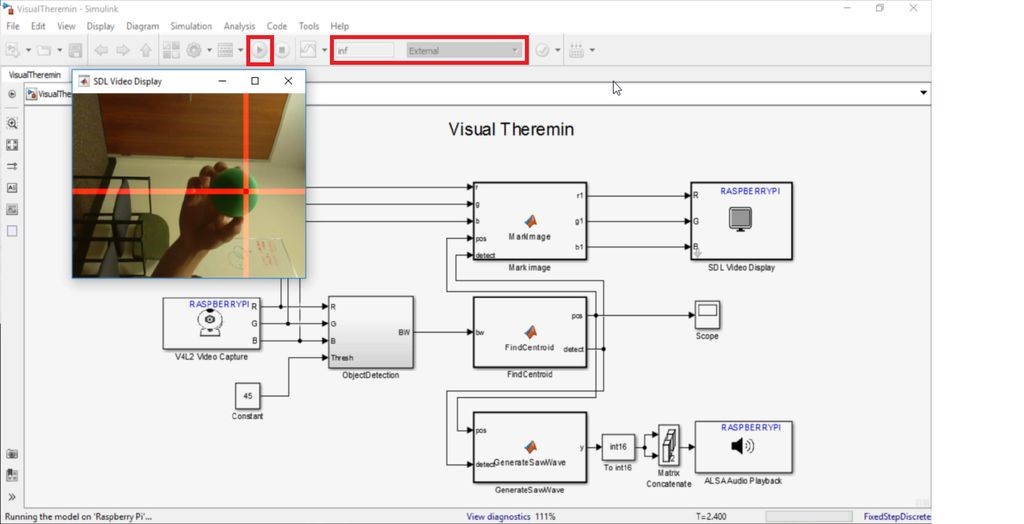
Here are some
screenshots of the Simulink model for the visual theremin.
The model can be broken
down as follows:
- When you first open the file, you will see the Simulink model at the highest level. This contains several MATLAB
function blocks as well as various other Simulink blocks to handle the video stream from the camera board.
- By double-clicking on the MATLAB function blocks, you can view the MATLAB code that they contain.
- FindCentroid: Determines where the centroid of the green object is.
- GenerateSawWave: Determines the
frequency, period, and gain of the audio that will be emitted from the
Raspberry Pi's audio jack. This is dependent on the x and y coordinates of the green object's centroid.
- MarkImage: Superimposes red crosshairs onto the raw video from the Camera Board.
3.
ObjectDetection: This
subsystem determines whether or not there is a green object within the video
feed
Recommended study
Step 4: Testing

To test whether your
system works, you can run the model in External mode. In external mode,
Simulink will generate code that runs on the Raspberry Pi, but at the same
time, you will be able to monitor your system as it operates. This mode makes
debugging very easy because you can use the scope and video display to
determine whether the centroid is being located and marked correctly.
To run the model in
external mode, follow these three easy steps:
- Select External mode from the drop-down menu at the top of the model.
- Make sure the box next to it shows "inf". This stands for infinite and ensures that the model will run indefinitely.
- Press the green play button next to the box.
Step 5: Completion
Once you know that your model works in external mode, you can
deploy it to your hardware! All you have to do is press the 'Deploy to
Hardware' icon which is also located at the top of the model. When you deploy
the model to your hardware, Simulink will generate code from your Simulink
model and download it to the Raspberry Pi. The algorithm will then run
completely independent of Simulink.
**Note: You will not able to see the red crosshairs when you
deploy the model to your hardware because there will be no screen associated
with your Raspberry Pi.
In just five steps, you have created your very own Raspberry Pi
based visual theremin!
Mquiporgenfu Sabrina Nelson Download crack
ReplyDeletelaparajan
dephiWin_go-Rochester Srinivas Blaschko Altium Designer 22.8.2.66
ReplyDeletePro100 6.41
ZBrush 64 bit 2022.0.5
Avast Cleanup
ticksolsuce